Raspberry Pi Camera Gimbal
Using OpenCV on a Raspberry Pi to control the Pi cam through pan and tilt oriented servos in order to keep the detected object at the center of the screen.
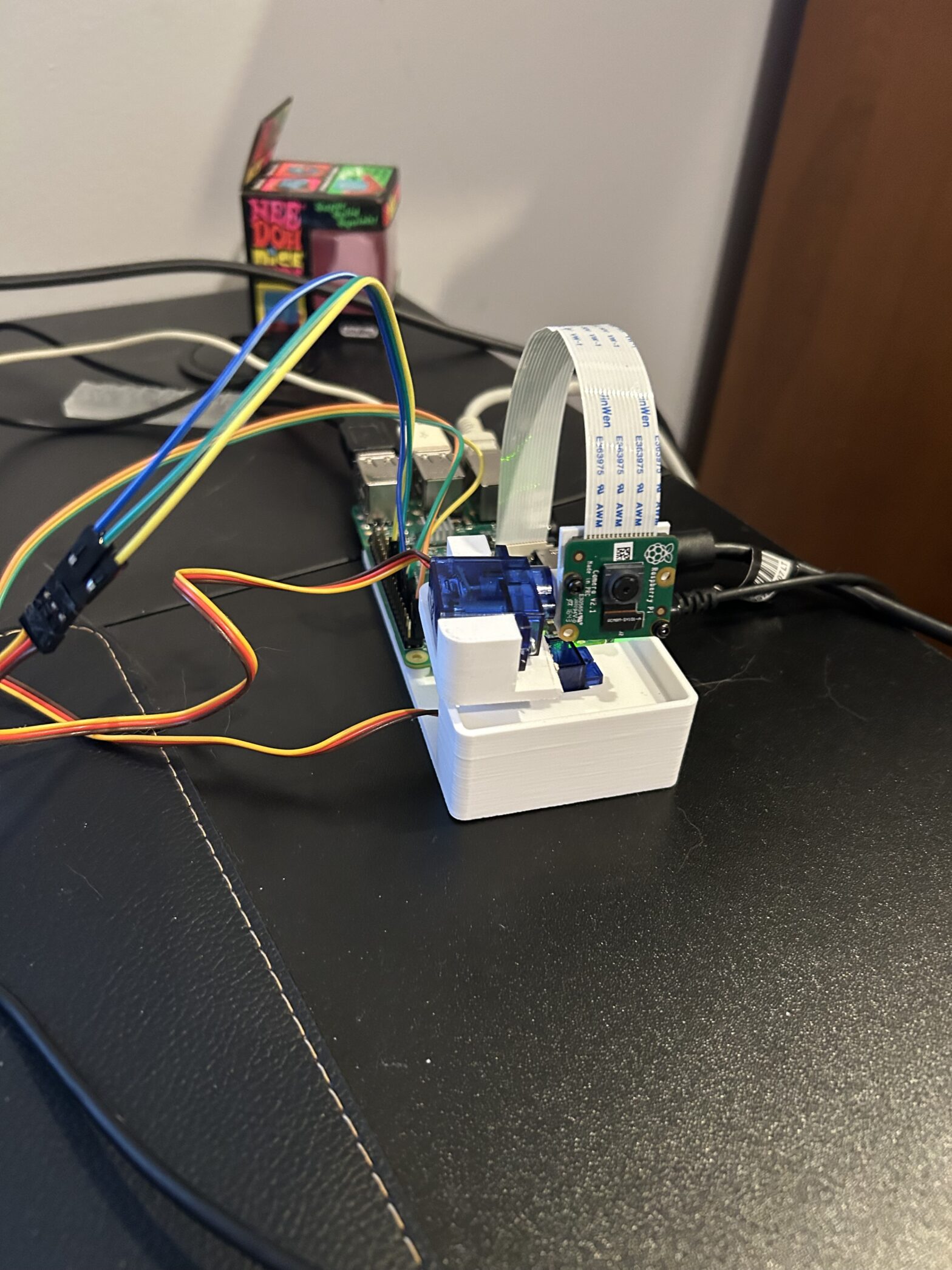
To learn more about Raspberry Pi’s, Python, and OpenCV I wanted to start this project. This utilizes the open source computer vision library in python to analyze the frames captured on the Picam2 and detect an object of a desired color. Using a Pi3, the frames captured by the picam are processed by the openCV functions and then an error in pixels is calculated from the center of the object to the center of the stream. Using the calculated error and pulse width modulation, a pulses are sent to the servos to correct the vertical and horizontal error.
This project was just recently started and there will be many future improvements. The current limitations are the processing power of the Pi3 and range of the picam2 which limit the accessible libraries for different recognition types and the distance for which it can detect an object.